
Our group’s research focuses on the design and fabrication of radio frequency MEMS resonant systems for wireless communication and sensing, as well as micro robotics for exploration and biomedical applications. A summary of some of the current projects can be found below:
Aluminum Scandium Nitride Acoustic Filters
Our group focuses on the design, fabrication, and study of Aluminum Scandium Nitride acoustic resonators for operation in S-Ku band. We investigate the material properties (e.g. crystalline microstructure, thermal conductivity, dielectric loss) of various types of AlScN thin films, and metal electrodes and study their impact on the resonator performance (e.g. Quality factor, electromechanical coupling, and power handling). The goal is to enable high-performance acoustic filtering at 2-18 GHz.


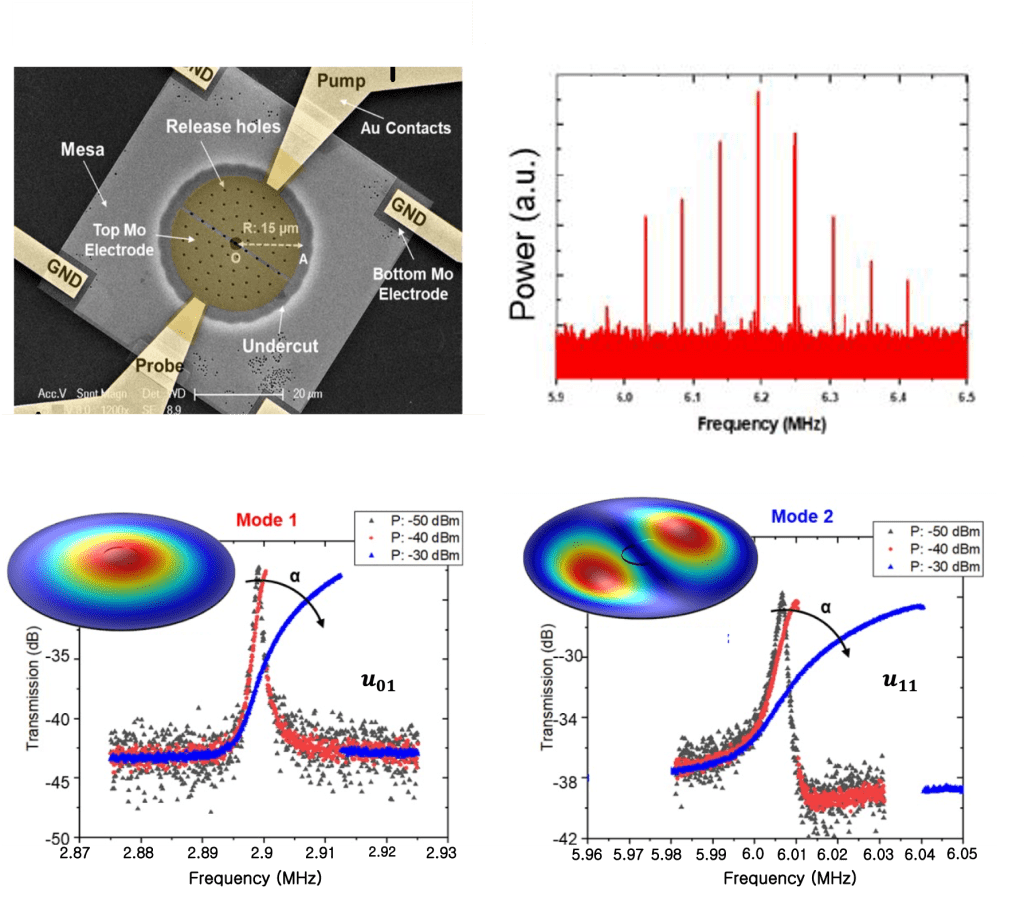
Phononic NEMS Frequency Combs
NEMS resonators can offer interesting nonlinear dynamics that can be exploited for novel device applications. In this project, we focus on modal coupling and duffing nonlinearity present in flexural and bulk-mode acoustic resonators to generate a “frequency comb” in the GHz range. Such frequency comb generators use the piezoelectric transduction in NEMS resonators and offer a very small footprint and low power consumption. These “rulers” in the frequency spectrum can be used for RF spectrum sensing in hand-held radios.
SWIM- Sensing With Independent Microswimmers
As a part of NASA’s Innovative Advanced Concepts (NIAC) Program, our group is collaborating with NASA JPL on micro-swimming robot swarm for extraterrestrial environment sensing and exploration. Targeting the mission to search life in the ocean found under the ice shell of Europa (moon of Jupiter), we are developing autonomous swimming robots fully equipped with different MEMS sensors, including temperature, pressure, salinity, pH, chemistry, and more. Once deployed, the swarm collectively and efficiently explores the waterbody as enabled by the optimized swarm algorithms, and relays the data back to the mothercraft.
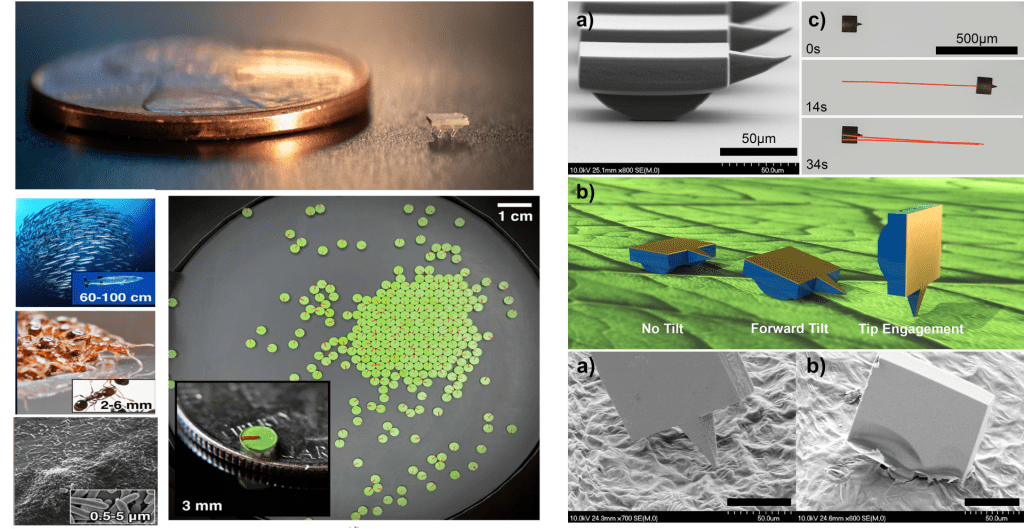
Vibration-powered micro robots and their swarm behavior
We investigated a wide range of micro robots whose motion is controlled by vibrations that are either harvested from the environment or generated with on-board piezoelectric units. With vibration actuation and control, we could achieve downsizing of the robots to millimeter and even micrometer scales. With the unique physics under these scales, hundreds and thousands of robots could be manipulated all at once, which enables applications including search and rescue, in-vivo targeted drug delivery, in-vitro bio sample manipulation.


Magnetic Micro drillers for Neurosurgery
Despite advances in radiation, surgery, and chemotherapeutic treatment over the past decades, the survival of malignant brain tumors remains poor. A major obstacle to brain tumor treatment is the access of tumors to drugs through natural physiological and pathobiological barriers like the blood-brain barrier (BBB) and blood-brain tumor barrier (BBTB). Therefore, a need exists for a steerable local delivery system (LDS) able to reach any intracranial location with minimal damage to critical functional and neurovascular structures. This LDS must be able to repeatedly deliver various targeted therapeutics to the tumor bulk over the course of disease progression.
Our work reports the first microdriller equipped with an on-board, pH-sensitive hydrogel and capable of controllable navigation inside a 0.6% agar gel tissue phantom, with a record small footprint for neurosurgical applications. With a width of 250µm and a length of 1.25mm, the microdriller is actuated by 10mT rotational magnetic fields for speeds up to 780µm/s. The associated force of drilling motion was calculated as 1.25mN, two orders of magnitude smaller than 300mN, which is the most common force magnitude measured from human performed neurosurgical procedure. The microdriller could also drill outside the medium (air or water) for retrieval. In the video shown, the microdriller can be guided via external magnetic field manipulation. Future work will focus on increasing the working space of the microdriller to encompass an entire human head for minimally invasive neurosurgery.
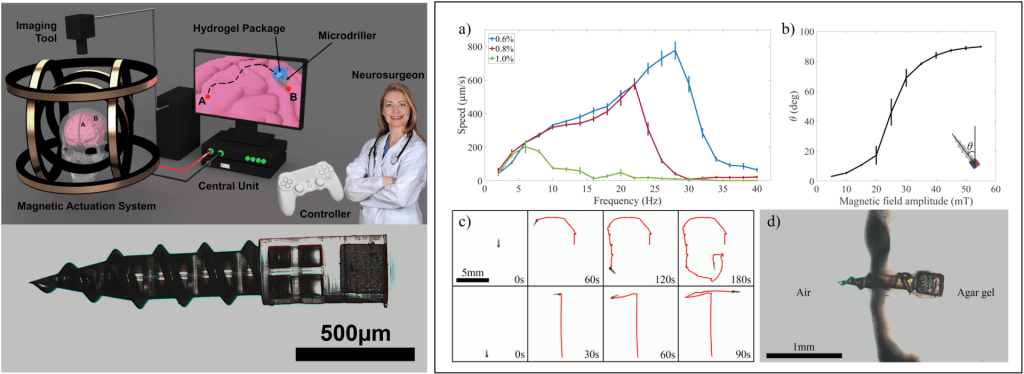
Fabricated microdriller with the proposed closed-loop control setup. 3D-controlled motion of the microdriller inside an agar gel.